这篇总结了Q-learning算法和DQN算法2013年的NIPS版本和2015年的NATRUE版本。
Q-Learning
为了得到最优策略Policy,我们考虑估算每一个状态下每一种选择的价值Value有多大。然后我们通过分析发现,每一个时间片的Q(s,a)和当前得到的Reward以及下一个时间片的Q(s,a)有关。在一个实验里,我们只可能知道当前的Q值,而不能够知道下一个时刻的Q值,但是Q-Learning建立在虚拟环境下无限次的实验,这意味着可以把上一次实验计算得到的Q值拿来使用。这样就可以根据当前的Reward及上一次实验中下一个时间片的Q值更新当前的Q值。
Initialize Q arbitrarily, Q(Terminal - state) = 0 // 初始化Q表中的值为0
Repeat (for each episode):
Initialize S // 每个新的回合,初始化S
Repeat (for each step of episode):
// 使用某个policy比如(e-greedy)根据状态S选取一个动作执行
// e 的概率去随机选取, 1-e的概率选取Q表中收益最高的action
// e 一般比较小,例如0.01
// 执行完动作后,观察reward和新的状态S'
Q(S, A) <— Q(S, A) + 𝛂(R + 𝛌maxQ(S‘, a) - Q(St, At)) // 贝尔曼方程
// 更新Q表中的Q(S, A)
// 𝛂为学习率,越大则保留之前训练的效果就越少
// 𝛌为折扣因子,即越远的未来收益越不确定
S <— S'
Until S is terminal
可以看知乎 - 牛阿的回答,以及CSDN上对Q-learning tutorial的翻译。
Q值可以想象为一个很大的表格,横列代表s,纵列代表a,表格内的值代表Q值:
| a1 | a2 | a3 | a4 | |
|---|---|---|---|---|
| s1 | Q(1,1) | Q(1,2) | Q(1,3) | Q(1,4) |
| s2 | Q(2,1) | Q(2,2) | Q(2,3) | Q(2,4) |
| s3 | Q(3,1) | Q(3,2) | Q(3,3) | Q(3,4) |
| s4 | Q(4,1) | Q(4,2) | Q(4,4) | Q(4,4) |
接下来对Q值进行更新:
- Step1. 初始化Q矩阵,比如都设置为0
| a1 | a2 | a3 | a4 | |
|---|---|---|---|---|
| s1 | 0 | 0 | 0 | 0 |
| s2 | 0 | 0 | 0 | 0 |
| s3 | 0 | 0 | 0 | 0 |
| s4 | 0 | 0 | 0 | 0 |
-
Step2. 根据当前Q矩阵以及e-greedy 方法获取动作。比如当前状态s1,那么在s1一列的每一个Q值都是0,那么这个时候选择什么动作都是可行的。
假设我们选择a2动作,然后得到的reward是1,并且进入到状态3,接下来我们要根据 ***Q(St, At) <— Q(St, At) + 𝛂(Rt+1 + 𝛌maxQ(St+1, a) - Q(St, At))*** 来更新Q值,这里假设𝛂=1,𝛌=1,并进入到s3状态,也就是每一次都把目标Q值赋给Q。Q(s1, a2) = 1 - Step3. 现在的状态是s3,假设选择动作a3,得到1的reward,状态变成s1,使用同样的方法,由于之前第一次更新,这次$maxQ(s_1, a) = 1$,因此$Q(s_3, a_3) = 2 + max(Qs_1, a) = 2 + 1 =3$
- Step3. 反复直至Q收敛。
重复 (对每个episode):
初始化状态S
重复(对edisode中的每一步)
使用某个policy比如(e-greedy)根据状态S选取一个动作执行
执行完动作后,观察reward和新的状态S’
$Q(S_t, A_t) <— Q(S_t, A_t) + 𝛂(R_{t+1} + 𝛌max(S_t, a))$
DQN
Value Function Approximation
在DQN中,为了解决状态过多无法用表格存储Q值的问题,使用$f(s, a, w)$近似的表示$Q(s, a)$,也就是使用一个函数来近似求解Q值。这个函数通过一个神经网络来训练参数达到收敛,当然这个收敛的过程还需要很多技巧,例如之后的经验回放机制等。
Network
DQN的输入是经过处理的4个连续的84x84图像,然后经过两个卷积层,两个全连接层,最后输出包含每一个动作Q值的向量。
| Layer | Input | Filter size | Stride | Num filter | Activation | Output |
|---|---|---|---|---|---|---|
| Conv1 | 84x84x4 | 8x8 | 4 | 32 | ReLU | 20x20x32 |
| Conv2 | 20x20x32 | 4x4 | 2 | 64 | ReLU | 9x9x64 |
| Conv3 | 9x9x64 | 3x3 | 1 | 64 | ReLU | 7x7x64 |
| fc4 | 7x7x64 | 512 | ReLU | 512 | ||
| fc5 | 512 | 18 | Linear | 18 |
Algorithms
2013年 NIPS版:

1、初始化replay memory D 容量为N
2、用一个深度神经网络作为Q值网络,初始化权重参数
3、设定游戏片段总数M
4、初始化网络输入,大小为84x84x4,并且计算网络输出
5、以概率ϵ随机选择动作$a_t$或者通过网络输出的$Q(max)$值选择动作$a_t$
6、得到执行$a_t$后的奖励$r_t$和下一个网络的输入
7、根据当前的值计算下一时刻网络的输出
8、将四个参数作为此刻的状态一起存入到D中(D中存放着N个时刻的状态)
9、随机从D中取出minibatch个状态
10、计算每一个状态的目标值(通过执行at后的reward来更新Q值作为目标值)
11、通过SGD更新weight
这里最关键的部分,一是理解经验回放replay memory的作用:它记录存储一个了经验集,每个经验包含一系列参数值,包括当前状态s,该状态选择的动作a,选择动作a后收获的reward,以及得到的下一个状态s‘;这样做的意义就在于,我们每次次训练Q网络的时候并不是实时的获取游戏屏幕上状态,而是从这个replay memory中随机抽取一个minibatch的经验集作为训练样本,这样的好处是打乱了样本顺序,使样本变的无序,没有关联,使Q网络能够更有效率的学习、收敛。二是理解Q网络是如何更新参数的:Q网络每次输出的一组不同动作Q值,我们去执行Q值对应的动作,从而获取下一个状态,和对应的奖励。这样做了之后,我们获取了下一个状态s’,作为Q网络的下一个输入,去获取Q网络估计的下一个状态的Q值Q‘;然后用Q’和奖励r,利用Q-learning中的贝尔曼方程,去计算当前的Q。Q-learning算出来的Q值和之前Q网络估计的Q值之间有一个偏差,这个偏差就是我们更新Q网络需要使用的损失。
用Q值作为Q网络的标签,损失函数为:$L(w) = \frac{1}{2}[ ( r + 𝛄maxQ(s’, a’, w) - Q(s, a, w) )^2 ) ]$
即对于给定的$<s, a, r, s’>$,更新参数的流程如下:
- 将当前状态s输入Q网络,获得所有动作估计的Q值。
- 执行Q值最大的动作a‘,并得到状态s‘,与相应的r。
- 将s’输入Q网络,得到所有动作的Q值,并选取这组Q值中最大的Q值$maxQ(s’, a’)$。
- 根据贝尔曼方程计算$r + \gamma{maxQ(s’, a’)}$
2015年 Natrue版:
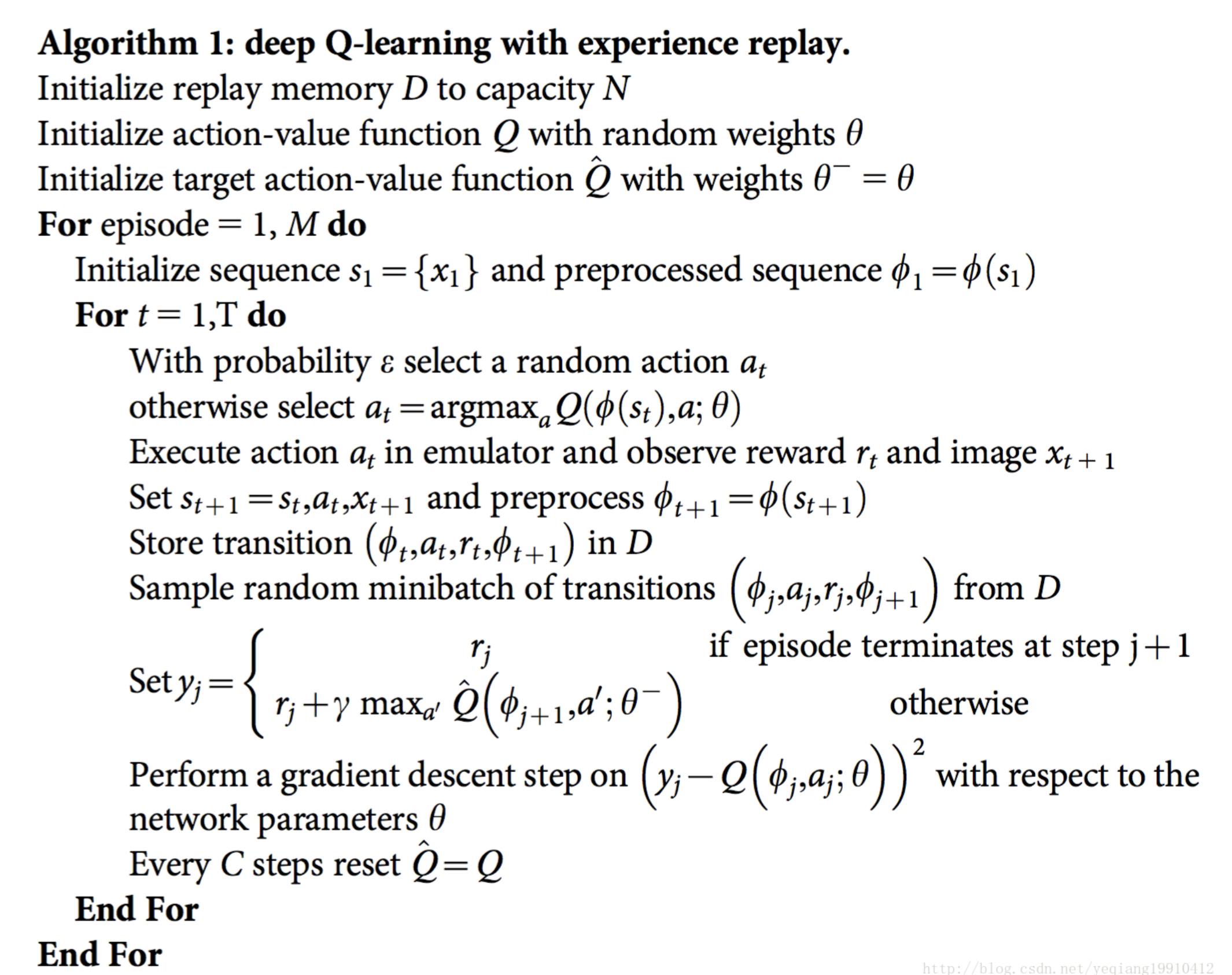
由于玩Atari采集的样本是一个时间序列,样本之间具有连续性,如果每次得到样本就更新Q值,受样本分布影响,效果会不好。因此,一个很直接的想法就是把样本先存起来,然后随机采样如何?这就是Experience Replay的意思。按照脑科学的观点,人的大脑也具有这样的机制,就是在回忆中学习。
算法分析:
-
训练分成M个episode,每个episode训练T次。我的理解就是比如玩游戏,一局是一个episode,一局里面有很多时间片,就训练多少次,次数不固定。重启新的episode主要是初始化state 作为新的第一个,而不是用上一局的最后的状态作为state输入。
-
实际上每个循环分成两部分:一部分是输出动作并存储。一部分是随机从经验池里取出minibatch个transitions,然后计算target,根据loss function通过RMSProp更新参数。
-
这里的算法我们可以看到,参数是一直更新的,而Nature的算法改进了,计算target用的是之前的参数。具体算法的变化等之后分析Nature的文章再说。
优点:
- 每一步的经验都能带来很多权值的更新,拥有更高的数据效率(个人不是很理解这作为一个优点,以前的算法就没有吗?)
- 就是experience replay的优势,打破数据的相关性,降低数据更新的不确定性variance。
- experience replay的另一个优点就是不容易陷入局部最优解或者更糟糕的不收敛。 如果是on-policy learning,也就是来一个新的经验就学一个。那么下一个动作就会受当前的影响,如果最大的动作是向左,那么就会一直向左。使用experience replay 获取的行为的分布就比较平均,就能防止大的波动和发散。也因此,这是一个off-policy的学习。